客服热线
010-61741200
电话:010-61741200
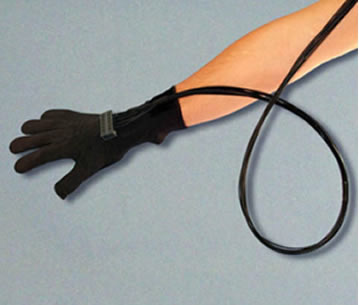
WonGlove19系列仿真数据手套的型号与功能描述
WonGlove19系列仿真数据手套适合应用在机器手手指协同,机械手臂的人机控制、远程交互、虚拟交互等应用方面。该系列数据手套有以下四种型号和对应的功能描述如下:
功能
型号
WONGLOVE数据手套的手指功能
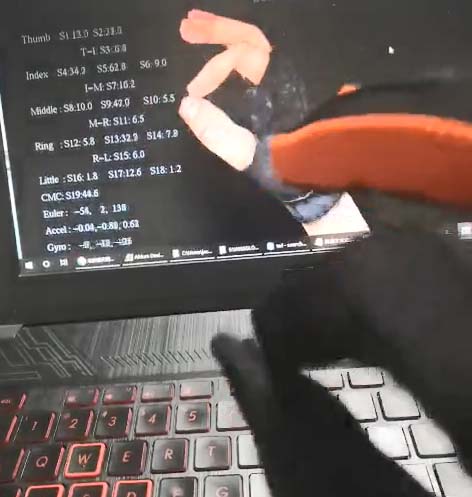
19个手指弯曲度传感器,分布在每个手指背上。
5个手指力反馈器,这些传感器分布在每个手指背上(适合WonGlove19F,WonGlove19F+)
3个手臂位置传感器,这些传感器分布在手臂大关节上(适合WonGlove19+,WonGlove19F+)
*多25个手指触觉力传感器,手指指尖、手掌内侧(适合元宇宙型号)
可实时捕捉人手5个手指的运动信息,例如常规的抓握物体动作。
可实现虚拟现实应用中常用的拇指搓捻功能, 例如搓绳子,拧螺丝,拇指食指捏取动作;
可以实现手臂和手掌的空间位置定位。(适合WonGlove19+,WonGlove19F+)
可实现手指触觉反馈。(适合WonGlove19F,WonGlove19F+)
可以实现手指抓握力检测。(适合元宇宙型号)
WonGlove19数据手套可选的数据接口有两种: USB有线和2.4G无线。
免费提供基于C++ 、Python、C# 的WINDOWS SDK, UNITY3D插件。
基于控制台,MFC, WIN32的OPENGL的骨骼动画演示程序; 基于U3D的虚拟人手3D模型演示例子和实现源代码。
程序语言方面,可以适用C++, C#, JAVA,PYTHON程序开发。
虚拟现实软件平台方面,可以适合大多数3D虚拟现实软件或者仿真开发平台,例如UNITY3D, UE4, MULTIGEN VEGA, VIRTOOLS, WTK, OSG, VRPN, HTC STEAMVR等,也可以支持专业的心理分析软件E-PRIME。在3D应用方面,推荐用户使用UNITY3D, UE4平台。设备配套的SDK也适合建立MotionBuilder插件,搭建基于MotionBuilder动画制作平台,WonGlove结合HTC VIVE, 客户可快速搭建3D互动开发环境。
面料
合成弹力纤维布
手指传感器数量
19个节点
手指传感器采样
12位A/D转换
数据包更新率
<100赫兹
传输范围
USB版本:3米/5米
2.4G无线 :10米(可视距离)
供电
DC 5V@500mA (典型的USB端口供电标准)
位置传感器(*本参数仅仅适合WONGLOVE19+,WONGLOVE19F+)
数量:3个传感器 精度:Z1°,XY0.2°
数量:5个手指反馈器 精度:128级软件可编程
Copyright 2020 www.www.pmlcs.cn All Rights Reserved 北京万视达伟业版权所有
服务地址:北京市朝阳区汤立路218号12层 服务电话:010-61741200
京ICP备13044415号